
自動運転車両の開発と普及が進んでいますね。
自動車メーカーだけではなく、テクノロジー企業やスタートアップ企業も開発に関与しています。
人間が運転しなくても自律的に走行する「自動運転車両」は、過去において全くの夢物語でした。ところが現在はAIとセンサー技術の発達によって開発競争が加速し、大規模な商用化の道が切り拓かれつつあります。

今回は前編と後編で飛躍的な進化を遂げた自動運転車両の”過去・現在・未来”について、AIと一緒に考察していきます。前編のテーマは過去と現在。自動運転車両の歴史とその取り組みについてです。
それでは早速見ていきましょう!
自動運転車両の過去と現在|定義と自動運転レベル・始まりとその歴史・取り組みをAIと一緒に考察
自動運転車両の定義と自動運転レベル
自動運転車両の定義
「自動運転車両(Autonomous Vehicles, AV)」は、人間の介入を最小限に抑え、または完全に排除して走行する車両を指す言葉です。
自動運転車両の中核はセンサー技術とAIです。LiDARやカメラ、レーダーなどのセンサーが周囲の環境をリアルタイムで検知し、AIがデータを解析して”安全な走行経路”を判断します。

加速・ブレーキ・ハンドリングが自動化された自動運転技術は、現在一般車両にも浸透しており、商用分野ではロボタクシーやバスなどの公共交通機関において”次世代型のサービス”を生み出しています。
自動運転レベル
自動運転レベルはアメリカの非営利団体「SAE International」が定めた規格で、レベル0から5までの6段階で分類されます。この標準規格は、現在世界の企業や規制当局が参照しているものです。

レベル0は手動運転、レベル1は運転支援、レベル2は部分自動運転、レベル3は条件付き自動運転、レベル4は高度自動運転、レベル5は完全自動運転で、最高レベルの5は自動運転車両の最終段階を指します。

レベル4・5はどちらも”人間が操作せず車両が動く段階”ですが、レベル4は気象や路面状態などの条件付きとなります。どんな気象条件と場所でも自動運転できる段階が、レベル5の完全自動運転です。
レベル5に到達した企業は現時点で存在しません。今後はレベル5の開発競争が加速するでしょう。
どの国が最初にレベル5に到達するかが楽しみです。
自動運転車両の始まり
1939年 アメリカ|自動運転車両のコンセプト
自動運転車両のコンセプトは、1939年のニューヨーク万国博覧会で披露されました。
1939年のニューヨーク万国博覧会において、アメリカの自動車企業ゼネラルモーターズ(GM・1908年創設)は、未来の都市と交通システムを描いたコンセプト展示「Futurama」を公開します。
ノーマン・ベル・ゲデス氏がデザインしたこのアトラクションFuturamaのテーマは「20年後のアメリカ」。観客は”動く椅子”に座りながら、ジオラマで再現された未来都市を体験しました。
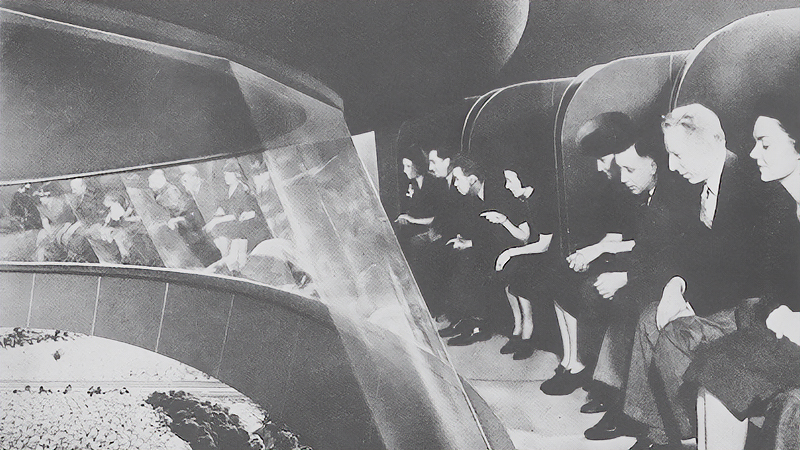
1エーカー(1,200坪)に及ぶこのジオラマでは、車が自動制御されながら一定速度で走行し、渋滞や事故を回避する高速道路のシステムが描かれました。自動運転技術の基礎概念に通じるものです。

当時の技術では実現不可能でしたが、自動運転の原型を印象付けた点で歴史的に重要な場面と言えます。
80年以上も前に自動運転の概念が生まれていたのですね。
自動運転車両開発と商用化の歴史
1950〜80年代|自動運転技術の黎明期
1953年、アメリカ企業RCAが高速道路でワイヤーを使って車を誘導する「自動運転道路システム」を提案。58年にはGMとRCAが高速道路上の電磁誘導線で車両を制御する”自動誘導車両”を試作開発します。

60年代に入ると、アメリカのスタンフォード大学やMITが”画像処理や自律制御の基礎研究”を始めます。これはロボティクスや人工知能分野の黎明期で、現在の「AI制御による自動運転車両」に繋がる研究です。

1969年、ドイツでエルンスト・ディックマン(Ernst Dickmanns)博士が、後に大きな成果を上げる研究に着手します。博士は後に「世界初の自動運転高速走行車」を生み出した中心人物です。
1980年代〜90年代|世界における開発の取り組み
1986年、ドイツでエルンスト・ディックマン氏とメルセデス・ベンツが共同開発した「VaMoRs」が、高速道路の自動運転に成功します。自動運転技術が研究所を飛び出した画期的な事例です。

同じく1986年、カーネギーメロン大学(CMU)が開発した「Navlab 1」が誕生。ベース車両はバンに大型PCを搭載したもので、ソフトウェアによる進路予測と物体認識の研究が重ねられていきます。

日本では90年代、通産省の支援下で画像認識による車線識別や障害物検知の研究が続けられ、トヨタや日産などが高速道路の先行車追従技術(ACC)を開発します。現在の運転支援技術レベル1〜2の先駆けです。
画像認識・制御アルゴリズム・GPS精度の向上などが進化を遂げ、完全自動運転も”やればできる”という空気が研究者の間に生まれた時期です。
自動運転技術の下地が整ってきた時代ですね。
2000年代初頭〜2010年代前半|自動運転技術の成長
2004年 アメリカ:画期的な自動運転車両レースの開催
2000年代初頭、アメリカ国防総省の研究機関「DARPA」は、戦場向けの自律走行地上車両(UGV)の開発を進めていましたが、閉鎖的な研究体制に限界を感じ、2004年に”オープンなレース大会”を開催します。

2004年に開催された「DARPAグランドチャレンジ」は、「全てオープンなコンテスト形式にして、自動運転開発を進めている世界中の頭脳に集結してもらおう」という大胆な発想の元に生まれた「完全自律走行レース」です。

80年代から自動運転技術の研究に取り組むカーネギーメロン大学(CMU)もチームとして参加。またスタンフォード大学など、有名大学の優秀な頭脳が参加したことによって、「自動運転技術の甲子園」的な側面が生まれました。

レースはカリフォルニア州からネバダ州を結ぶ約240kmの砂漠ルートを”遠隔操作と人間の介入なし”で走破する過酷なもので、衝撃の「参加全15チームリタイア」という結果に終わります。
この惨敗は開発者たちの熱意と情熱を大いに高めたと思われます。
レース条件の厳しさが開発者の魂に火を付けたのですね。
2005年 アメリカ:歴史的偉業の達成
翌2005年、同条件で開催されたレースでついに優勝者が登場します。約6時間54分(平均時速31km)で勝利を収めたのはスタンフォード大学のStanley号で、CMUチームも完走しました。

過酷な条件下を完全自律運転で走破したStanley号を開発したプロジェクトリーダーは、セバスチアン・スラン氏。スラン氏はGoogleの自動運転車両プロジェクト(後のWaymo)の創設者となる人物です。

なお、同大会で初優勝という快挙を達成したスタンフォード大学のStanley号は、その自律走行技術の歴史的意義を讃えられ、現在はスミソニアン国立航空宇宙博物館に収蔵されています。
Stanly号は自動運転技術飛躍のシンボルですね。
2007年 アメリカ:社会実装を見据えたレース
2007年の「Urban Challenge」では”自動運転の社会実装”を見据え、公道を模した市街地環境でレースが開催されます。CMUが念願の1位を初めて獲得。スタンフォード大学は2位という結果を残しました。

CMUチームのクリス・アームソン氏は、レース後にGoogle(現Waymo)へ移籍。セバスチアン・スラン氏と同様に、その才能で「自動運転車両の商用化」を牽引していくことになります。

 ©︎2025 Carnegie Mellon University.
©︎2025 Carnegie Mellon University.2007年大会は、自動運転車両が初めて「都市部の複雑な運転状況で自律判断を行なったコンテスト」として非常に意義があったレースです。
参加チームの競争意識が自動運転技術を一気に成長させましたね。
2009年〜2010年代前半 開発競争の激化
2009年にGoogleが自動運転車両開発に参入。「DARPAグランドチャレンジ」優勝歴を持つセバスチャン・スラン氏ら、スタンフォード大学出身者を中心に「Google Self-Driving Car Project」が発足します。

2016年に同プロジェクトがGoogleから分社化。名称も「Waymo」へ変更されます。名前の由来は”モビリティにおける新たな前進”です。この時期には世界の企業や研究者が自動運転車両開発を加速していました。
この時代、自動運転車両は夢の技術ではなく、「誰が最初に実用化するか」の開発競争レースへ変わっていきます。AIの発達も開発に大きく貢献しました。
自動運転車両がついに「社会進出」の軌道に乗った感じですね。
2018年〜2020年|ロボタクシーの誕生:アメリカ・中国
2018年、Waymoはアリゾナ州フェニックスで世界初のロボタクシーサービス”Waymo One”を開始。最初は人間の補助運転手が乗車していましたが、2019年には一部が完全無人タクシーとして運行します。

同じく2018年、中国×シリコンバレーのハイブリッドベンチャー企業「Pony.ai」(外部リンク)は、広州市で自動運転車両の実証実験を開始し、アメリカのカリフォルニア州フリーモントでも走行許可を取得します。

Pony.aiは2019年に入ると、中国・広州で初の公開型ロボタクシー実証実験をスタート。2020年には中国での走行距離が累計100万キロを突破し、量産化と展開加速へ向けてトヨタとの提携も発表しました。

Waymoが”正統派の本命”として堅実に進化しているのに対し、Pony.aiは”挑戦型”としてスピードと国際展開で存在感を増しているというのがAIの評価で、両者の開発競争には今後も期待が高まります。
WaymoとPony.aiの違いは市場の差異だけでなく、「自動運転の未来をどのように切り拓くのか」という哲学の違いでもあると思います。
自動運転技術の一般普及ではアメリカと中国が先行していますね。
2021年〜2025年|自動運転商用化が加速
2021年 アメリカ・中国・日本
2021年、Waymoがサンフランシスコでロボタクシーサービスのテストを拡大し、新興企業Nuroは、カリフォルニア州で初の自動運転配送許可を取得。自動運転のテスト走行免除が各州へ拡大し始めたのもこの年です。

同年、中国ではAutoXが深圳で完全無人ロボタクシーサービスを展開。また検索エンジンで有名なBaiduは、北京で傘下企業による「Apollo Go」ロボタクシーサービスを提供開始しました。

2017年に設立された中国の「WeRide」(外部リンク)は、2021年に世界初の「米国と中国における無人テスト走行の許可」を取得して、広州でロボタクシーサービスを開始しています。

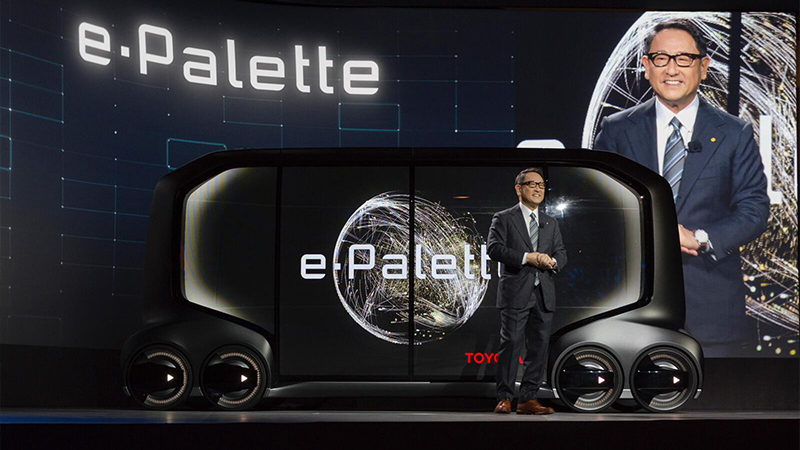
日本では東京オリンピックの会場で、トヨタがレベル4自動運転車両「e-Palette」(外部リンク)を選手村の限定エリアで運用。日本における自動運転車両の存在感を世界へとアピールしました。
2022年〜2023年 アメリカ・中国・日本
2022年、GM Cruiseはカリフォルニア州公共事業委員会の許可を取得。サンフランシスコで24時間有料ロボタクシーサービスを開始します。同社はGMの自動車開発部門が母体の企業です。

2023年、Waymoはロサンゼルスで完全無人ロボタクシーサービスを開始。フェニックスではデリバリーサービスの大手「Uber Eats」と提携してフードデリバリーも展開しました。

テスラは2023年にかけて”Full Self-Driving(FSD)”システムのベータ版を改良。これは「カメラを主体にAIが周囲を検知する」アプローチで、自動運転レベル2以上の機能を強化するものです。

テスラはWaymoが採用するLiDARの不要論を主張しますが、LiDAR派は「多様なセンサーによる冗長性は不可欠」と反論しており、自動運転技術の未来を巡る技術的・哲学的議論は今も続いています。
この議論の行末にも注目が集まっています。
順調に見えた商用化の中で悲劇が発生
2023年10月2日、サンフランシスコでCruiseのロボタクシーが重大事故を起こします。きっかけは、別の人間が運転する車両が歩行者をはね、衝撃で歩行者がロボタクシーの進路上に投げ出されたことでした。

ロボタクシーは急ブレーキ後に歩行者と衝突し、道路脇に寄せる動作の際に歩行者を約6メートル引きずりました。これによって歩行者は重傷を負い、病院へ搬送されます。LiDARとAIの非検知・誤分類が要因です。

事故後、カリフォルニア州車両管理局(DMV)による停止命令を受けたGM Cruiseは、サンフランシスコだけはでなく米国全土で無人運転ロボタクシーの運行を”自主停止”。その後撤退することになります。
GM Cruiseの今後
GM Cruiseは、これまでに培ってきた自動運転技術を”個人向け車両”へ還元することを発表しています。自動運転技術分野から完全に撤退したわけではありません。立ち直る姿を見守っていきましょう。

事故はLiDARの限界を一部露呈し、一時的に信頼性に疑問を投げかけましたが、業界全体ではLiDARの採用は続いており、技術改良も進んでいます。
AI自動運転車両の商用化に影を落とした事故ですね。
2024年〜2025年 アメリカ・日本
2024年12月、Waymoは日本交通と配車アプリ”GO”との提携を発表し、2025年から東京でジャガー・ランドローバー製のEV「I-PACE」を用いた測量を開始しました。Waymo初の海外進出に選ばれたのは日本です。

Waymoの日本進出には、人口密度の高い東京が持つ複雑な交通環境におけるデータ収集を通じて、自社の自動運転技術「Waymo Driver」の適応力を検証する狙いがあると思われます。
Waymoは自動運転の商用化で確固たる地位を築き上げましたね。
日本における自動運転車両の考察
自動運転の歴史を見ていくと、WaymoやPony.aiなど、技術を商業化へ推進する企業が最初に目指しているのは、ロボタクシーやデリバリーサービスへの応用、つまり「都市部の自動運転需要」です。

ただ日本では高齢化や過疎化で「バス運転手」が不足している地域があり、それが路線廃止などの社会問題に繋がっています。こうした喫緊の課題を解決する一助としても、自動運転技術は有益なはずです。
自動運転EV「MiCa」
新潟県の弥彦村は、ソフトバンクの子会社「BOLDLY(ボードリー)」(外部リンク)や大日本印刷株式会社などと協力し、2024年2月2日から自動運転EV「MiCa(ミカ)」の通年運行を開始しました。

弥彦村ではバス事業者の事業撤退などを受け、隣接する燕市と共同で広域循環バス「やひこ号」を運行していますが、ドライバーの高齢化や不足に伴い、ルート拡大といった住民のニーズに応えることが難しい状況にありました。

こうした課題に対して村は、持続可能で利便性が高い公共交通サービスを実現するため、国土交通省の「自動運転実証調査事業」の採択を受け、自動運転EV「MiCa」2台の通年運行を開始することにしたのです。
RoAD to the L4プロジェクト
2021年にスタートした「RoAD to the L4プロジェクト」(外部リンク)は、日本の経済産業省・国土交通省の委託事業として、自動車産業の動向を踏まえながら”持続可能なモビリティ社会”を目指す国家プロジェクトです。

プロジェクトの目標は”自動運転レベル4の移動サービスを実現・普及すること”で、取り組みを促進しながら環境負荷の低減、移動課題の解決、日本の経済的価値の向上に貢献することを目指しています。

日本が主に「地方」を舞台にレベル4の自動運転サービスを加速させていることは、非常に理に適った政策であると感じます。「本当に必要としている人」に向けたサービスは”社会貢献”に他ならないからです。
日本の事情を加味したの自動運転技術の発展にも期待したいですね。
前編まとめ
ニューヨーク万国博覧会でGMが披露した「Futurama」は、自動制御の車両を描き、「運転手のいない未来」を予見しました。80年以上の時を経て、その夢は今”現実”として世界中に広がっています。

自動運転技術の最前線を走るのはアメリカと中国です。そしてアメリカのWaymoが日本へ進出することで、運転手を持たない「ロボタクシー」が、東京における身近な交通機関になる未来も近づいてきました。

日本政府は、高齢化と過疎化が深刻な地方のインフラ問題を解決すべく、企業と連携してレベル4自動運転サービスを順次展開していく構想を打ち出しています。この流れはさらに加速していくことでしょう。

記事の後編では、2025年から2050年の時代を5年ごとに分けて、自動運転技術”進化のタイムライン”をAIの未来予測で探っていきます。こちらの特集も併せてお読みいただけると幸いです。
最後までお読み頂き、ありがとうございました!


コメント